
Dynamic Shared Limbs: An Adaptive Shared Body Control Method Using EMG Sensors
Abstract
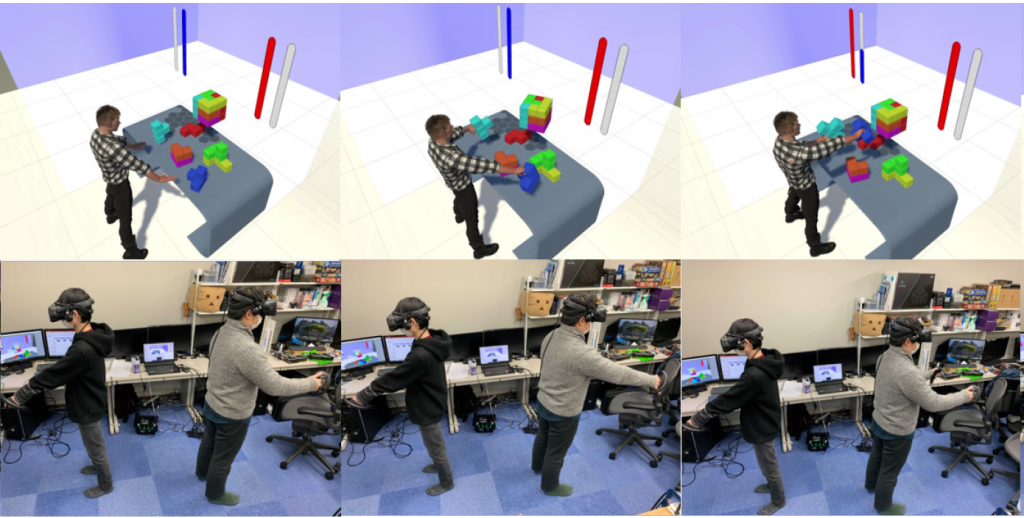
An inter-personal shared body is an extended body that allows an avatar or robot to be controlled by multiple people. It is possible for operators to share control over the actions of the shared body. A shared body can be operated well when the same actions are performed by its operators. However, when their actions are not the same, we need to have an adaptive control method for the operators to maintain a sense of agency and ownership. In this study, we propose dynamic adjustment methods to control a shared body using EMG sensors and movements of the operators.
Member
Ryo Takizawa
Takayoshi Hagiwara
Adrien Vehulst
Masaaki Fukuoka
Michiteru Kitazaki
Maki Sugimoto
Publications
Ryo Takizawa, Takayoshi Hagiwara, Adrien Verhulst, Masaaki Fukuoka, Michiteru Kitazaki, and Maki Sugimoto, Dynamic Shared Limbs: An Adaptive Shared Body Control Method Using EMG Sensors, Proceedings of the Augmented Humans International Conference (AHs ’21), pp. 10-18, 2021.2, URL:https://doi.org/10.1145/3458709.3458932
Acknowledgement
This project was supported by y JST ERATO Grant Number JPMJER1701.