
動的な光源環境における奥行き情報に基づく物体の位置・姿勢計測
3D object tracking is an important technique for Spatial Augmented Reality. The drastic change of illumination in a SAR environment makes object tracking difficult.
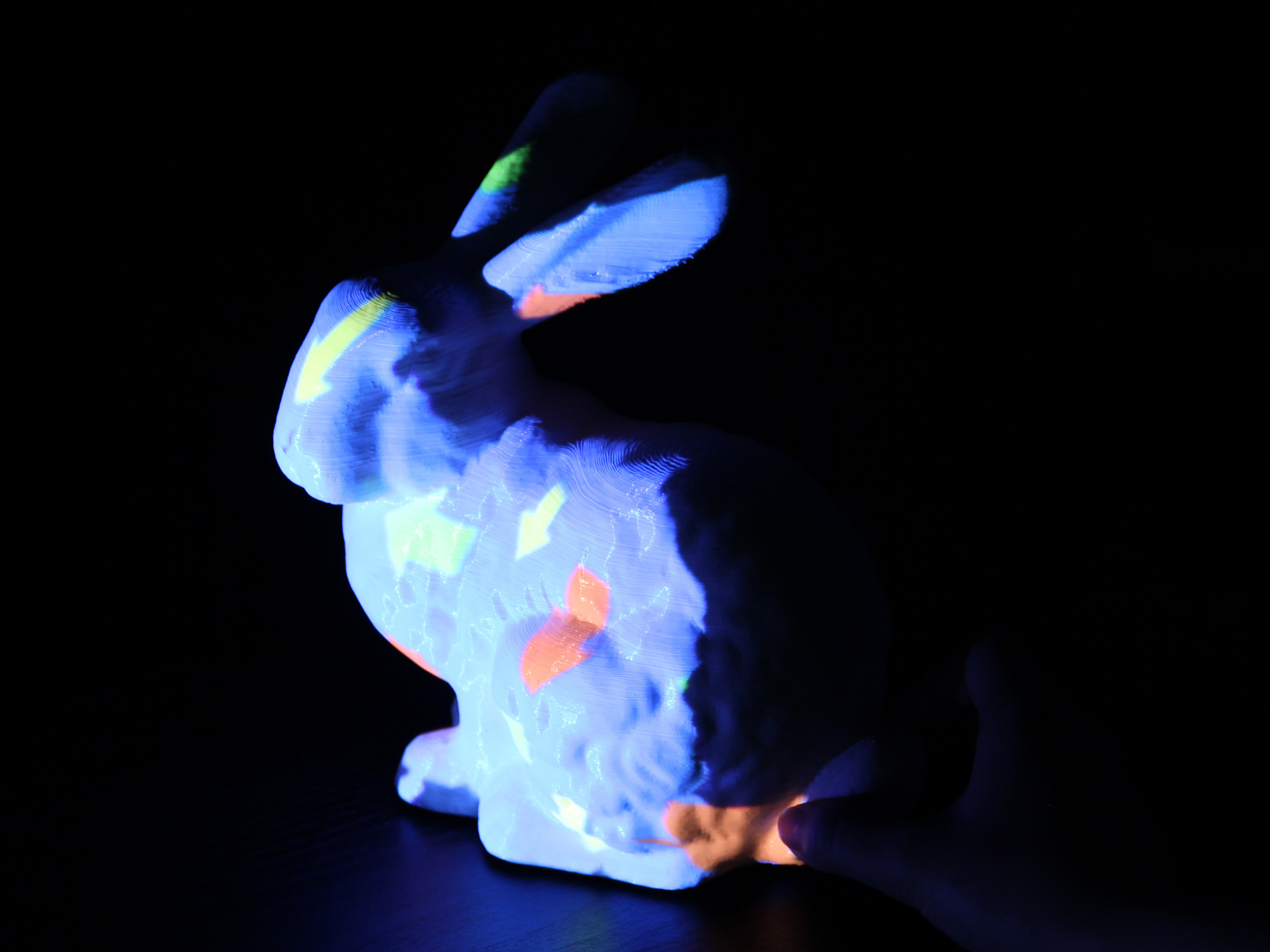
Our method allows maker-less tracking of the moving object under illumination changes by using single depth camera . The tracking is a combination of feature based matching and frame sequential matching of point clouds.
空間型のAR環境を構成する上で,三次元の物体の位置計測は非常に重要な技術です.特にプロジェクタを用いたAR環境においては,システムが実環境へ投影する動的な光が画像処理による物体の検出を難しくしています.本研究では,奥行き情報のマッチングにより光源環境の変化に頑強な位置・姿勢検出手法を提案します.
Member
坪井一菜
鐘ヶ江資子
小山田雄二
杉本麻樹
斎藤英雄
Publication
坪井一菜,鐘ヶ江資子,小山田雄二,杉本麻樹,斎藤英雄,デプスカメラにより取得される部分形状テンプレートのマッチングによる3次元物体のリアルタイムトラッキング,第182回CVIM研究会,2012
Kazuna Tsuboi, Yuji Oyamada, Maki Sugimoto, Hideo Saito, 3D Object Surface Tracking Using Partial Shape Templates Trained from a Depth Camera for Spatial Augmented Reality Environments, Proceedings of the Fourteenth Australasian User Interface Conference (AUIC),Conferences in Research and Practice in Information Technology (CRPIT) Vol 139, pp. 125 – 127, 2013
<<Projects