
実環境と移動体モデルを考慮した未来予測画像提示による操作支援システム

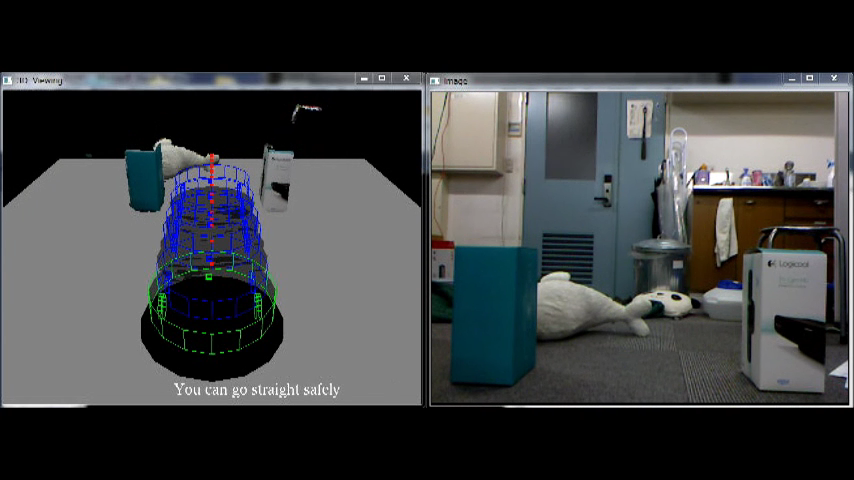
Nowadays, controlling vehicles through video image-based interfaces is becoming more common. Tele-robot operation is one of applications of those interfaces.Thanks to advanced functions of driving assistance systems, it is possible to automatically avoid actually crashing with obstacles. However future prediction in real time route planning during actual operation is a challenging issue for operators. This paper introduces a vehicle operation interface which presents a predicted future. The interface consists of a real time depth image based on modeling technique of real environments and a trajectory prediction of a vehicle. The predicted vehicle interacts with the real world by using a physics engine on Augmented Reality. It assists human ability to control vehicles in unknown real environments.
ロボットの遠隔操作のインタフェースとして,現在の操作情報と周囲の環境に基づき物理的な干渉を考慮した未来予測画像を生成・提示することでユーザのロボットの操作性を向上させる研究を行っています.本手法ではデプスカメラによってリアルタイムに実環境内の状況を取得し,障害物の形状モデルを生成しています.さらに,現在の操作情報に基づき,数秒後にロボットがどのような位置にいるかを予測し,障害物モデルとロボットの予測モデルの間で物理シミュレーションを行うことにより干渉を考慮した未来予測画像を生成しています.
{kind=link}
Member
前田直哉
杉本麻樹
Publication
前田直哉, 杉本麻樹, 実環境と移動体の予測モデルを考慮した未来画像生成による操作支援システム, ロボティクス・メカトロニクス講演会2013, No.13-2, 1A2-R13, 2013
前田直哉, 杉本麻樹, 実環境との干渉を考慮した未来予測モデルの実写履歴画像への重畳による遠隔操作支援システムの提案 , 第18回 日本バーチャルリアリティ学会大会, 12-5D, p.138-141, 2013 ![]()
Naoya Maeda, Maki Sugimoto, Pathfinder Vision: Future Prediction Interface for Vehicle Operation, ISMAR2013, Australia, Adelaide, Oct. 1-4, 2013 (Demo Session)
Naoya Maeda, Chiyoung Song and Maki Sugimoto. Pathfinder Vision: Future Prediction Augmented Reality Interface for Vehicle Tele-operation Using Past Images, International Conference Artificial reality and Telexistence 2013(ICAT2013), Tokyo, Japan, Dec. 11-13,2013
Naoya Maeda, Maki Sugimoto, Pathfinder vision: tele-operation robot interface for supporting future prediction using stored past images, The 41st International Conference and Exhibition on Computer Graphics and Interactive Techniques(SIGGRAPH2014), 1pages, Aug. 10-14, 2014