
拡張現実感技術を用いた遠隔溶接ロボット操作インタフェース
Abstract
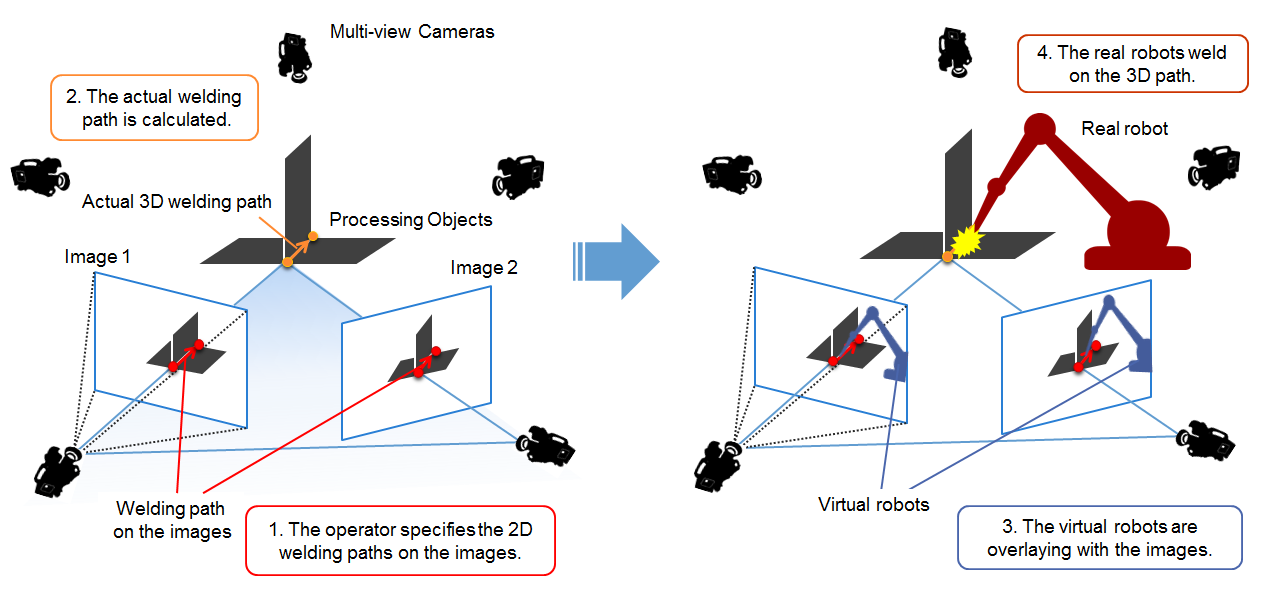
When operating the robot remotely, interfaces using augmented reality technology allow non-expert users to specify processing procedures intuitively and to fulfill required accuracy. We propose a remote welding robot operation interface by using multi-view images and augmented reality. After an operator specifies a two-dimensional path on images, the system transforms it into a three-dimensional path and displays the movement of the robot by overlaying virtual CG robots onto the images. We evaluated the accuracy of our system if it is sufficient enough to weld real objects.
遠隔でロボットの操作を行う際,作業の要求精度を満たし,かつ初心者でも直感的に作業内容を指定できる方法として,多視点映像と拡張現実感を用いた溶接ロボットの遠隔操作インタフェースを提案する.本システムでは,ユーザが2 視点以上の映像上で溶接経路を指定すると,実世界の3 次元溶接経路を計算し,その経路をロボットが溶接する際のシミュレーションを映像に重畳する.実験を通し,本システムは溶接の要精度を満たして溶接経路を指定できることを検証した.
Members
Yuichi Hiroi
Kei Obata
Katsuhiro Suzuki
Naoto Ienaga
Maki Sugimoto
Hideo Saito
Publications
Yuichi Hiroi, Kei Obata, Katsuhiro Suzuki, Naoto Ienaga, Maki Sugimoto, Hideo Saito, Tadashi Takamaru, Remote Welding Robot Manipulation using Multi-view Images, Proceedings of 2015 IEEE International Symposium on Mixed and Augmented Reality (ISMAR’15), pp.128–131, 2015
廣井 裕一, 小畑 圭, 鈴木 克洋, 家永 直人, 杉本 麻樹, 斎藤 英雄, 高丸 正, 拡張現実感技術を用いた遠隔溶接 ロボットインタフェースの開発, 電子情報通信学会技術研究報告2015, Vol.115(375), p11-p16, 2015-12-17