Driving Posture Classification with Time-of-Flight Sensor Arrays and Machine Learning
Abstract
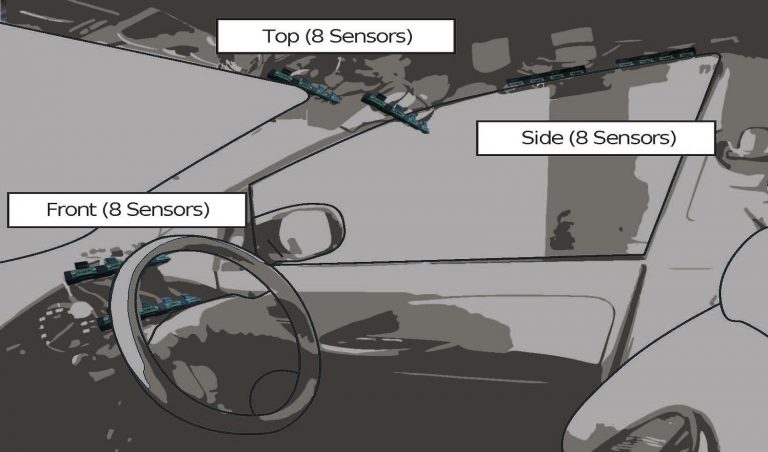
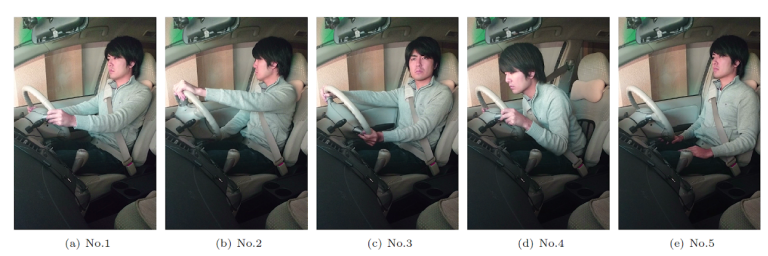
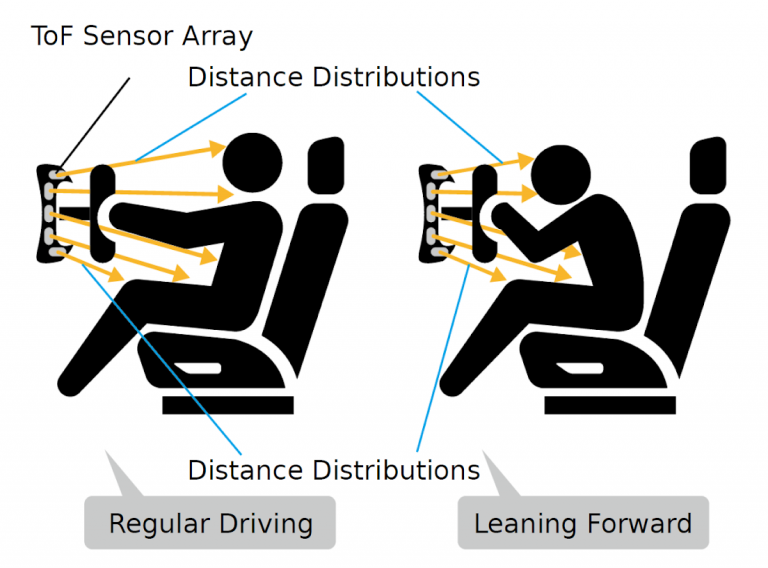
In this paper, we propose a method to classify the posture of a driver in a vehicle using Time-of- Flight (ToF) range sensors and machine learning. Conventionally, to estimate the posture of a driver, there are methods using RGB or depth cameras around the driving seat. However, previous estimation methods needed to handle large data from the cameras, and privacy can be an issue in such a camera based system. In this study, we propose a range sensor based driving posture classification method. We design a sensing system which consists of range sensing modules around the driving seat inside a vehicle, and the system identifies the posture of the driver by distributions of the sensor values. We installed the system into a vehicle and verified the feasibility of the proposed method.
Members
Eito Yamaga, Nao Asano, Yuta Sugiura, Maki Sugimoto